3 Anforderungen an die Neuentwicklung
4.3 Vor- und Nachteile einzelner Lösungsmöglichkeiten zum Abstützen
10 Fertigungsunterlagen
( Nicht im Netz verfügbar )
In der vorliegenden Arbeit wird der Weg von einer vagen Aufgabenstellung zu den Fertigungsunterlagen eines neuen Produktes beschrieben. Die Aufgabe war es, ein Gerät zur Inspektion und Wartung von Klimakanälen zu entwickeln.
Der erste Schritt ist die Aufstellung eines Projektplans, indem die einzelnen Projektschritte und der geplante Zeitaufwand für diese aufgestellt sind. Danach wird die Marktsituation beschrieben. Mittels Befragung potentieller Kunden und Sichtung von Herstellerunterlagen von Lüftungsbaufirmen wird eine Anforderungsliste erarbeitet. Für einen Überblick über die benötigten Funktionen des zu entwickelnden Produktes wird ein Funktionsplan erstellt. Eine mittels der Brainwriting Methode erstellte Morphologie liefert die Grundlage für die darauffolgende Phase der Lösungsbewertung und Auswahl. Im nächsten Schritt wird ein parametrisches Modell des Luftkanalroboters LuRo auf dem in der Firma neu eingeführtem 3-D CAE System Unigraphics Solutions erstellt. Parallel dazu werden einige Berechnungen zur Dimensionierung von kritischen Teilen des LuRo durchgeführt.
Das Ergebnis der Arbeit sind die aus dem 3-D Modell abgeleiteten Fertigungsunterlagen mit fertigungsgerechter Bemaßung, sowie die Stücklisten der einzelnen Module. Der LuRo ist ein sehr flexibel einsetzbares und modular aufgebautes Gerät für den harten gewerblichen Dauereinsatz. Er bietet die Möglichkeit Luftkanäle zu befahren, zu inspizieren und Arbeitsgeräte kontrolliert und Kamera überwacht an ihrem Einsatzort zu befördern. Zusammen mit der entwickelten Bürsteinheit ist der LuRo eine gute, brauchbare und schnelle alternative zu den bisher verwendeten Techniken.
Die bei der Einführung des 3-D Systems aufgetretenen Probleme und errungenen Vorteile werden kurz in Abschnitt 8 Methodenkritik 3-D CAD zusammen gefaßt.
Diese Diplomarbeit entstand in Zusammenarbeit mit der Firma DTI Dr. Trippe Ingenieurgesellschaft mbH, die Roboter zur Sanierung von Abwasserkanälen und die zugehörigen Einsatzfahrzeuge entwickelt. Das Konzept der Firma ist es robuste Geräte herzustellen die einfach zu bedienen und wartungsarm sind. Der neue LuRo kann an dem vorhandenen Mobilsteuerstand, der für Abwasserkanalroboter benutzt wird, angeschlossen werden.
Der Projektplan für die Entwicklung des Gerätes zur Inspektion und Wartung von Luftkanälen wird in Zusammenarbeit mit der Geschäftsleitung und dem Leiter der Konstruktion von DTI erstellt. Er gliedert sich wie folgt:
1 Erstellung der Anforderungslist
Zeitbedarf ca. 3 Wochen
3 Bewertung der verschiedenen Lösungsansätze
Zeitbedarf ca. 3 Wochen
In diesem Kapitel wird beschrieben,
auf welchem Weg die Anforderungsliste für die Aufgabe entsteht.
Der Stand der Technik im Bereich der
Kanalreinigung ist: Die vorhandenen Verschmutzungen in den Luftleitungen
von Klimaanlagen werden mit einfacher Bürstentechnik gelöst und
mit Hilfe eines am Ende der Rohrleitung angeschlossenen großen und
leistungsstarken Staubsaugers aus der Anlage entfernt. Zu Bürsten
werden oft flexible Wellen eingesetzt. Die Vorteile dieser Hilfsmittel
sind die einfache Bedienung und die geringen Anschaffungskosten. Die Nachteile
sind jedoch, daß der Staubsauger schwer zu transportieren ist, daß
man sämtliche Abzweigungen und Lüftungsgitter zwischen Bürstwerk
und Staubsauger verschließen muß, und daß die Reichweite
dieser Systeme aufgrund der Strömungsverluste in den Kanalrohren sehr
begrenzt ist. Außerdem ist zur Dokumentation des Reinigungserfolges
ein zweiter Arbeitsgang mit einer Kamera erforderlich. Die Kamera wird
dazu an einem Kabelaal, oder einem Roboterfahrzeug montiert.
Im Bereich der Roboterfahrzeuge zur Luftkanalreinigung
sind nur zwei nennenswerte Produkte vorhanden. Zum einen der Bandy II
von der Firma AirTec GmbH und zum anderen das Fahrzeug der Firma
Danduct.
Sie sind in den folgenden Abbildungen zu sehen. Zu beiden Systemen sind
auch Anbaumodule zum Bürsten erhältlich. Bei der Befragung von
Firmen, die diese Produkte einsetzen, ergibt sich jedoch, daß diese
Roboterfahrzeuge sehr störanfällig sind. Außerdem werden
die angebotenen Bürstmodule in der Praxis selten eingesetzt, da sie
zu unflexibel und zu leistungsschwach sind.
Abbildung 1: Roboterfahrzeug Bandy II
Abbildung 2: Roboterfahrzeug der Firma
Danduct
Welcher minimale Kurvenradius soll bewältigt werden? Welche Steigungen sollen überwunden werden? Welche sonstigen Hindernisse müssen überwunden werden? Welche Reichweite soll das Roboterfahrzeug haben? Welche Arbeiten sollen im Lüftungsschacht ausgeführt werden? Was stört Sie besonders an den bisher eingesetzten Produkten? Was gefällt Ihnen an den eingesetzten Produkten? Haben Sie noch andere Wünsche, welche das Produkt erfüllen soll? Wünschen Sie eher ein extrem zuverlässiges high end Produkt oder eher ein sehr einfaches und preiswertes Sparprodukt?
Im Rahmen der Diplomarbeit liegt der Schwerpunkt
auf der Entwicklung eines Basisgerätes für die in der Praxis
am häufigsten vorkommenden Luftkanäle. Diese haben einen flachen
rechteckigen Querschnitt und werden unter Zwischendecken montiert. Das
Gerät muß jedoch auch einfach für die restlichen Querschnittsbereiche,
die in der Anforderungsliste aufgelistet sind, umgerüstet werden können.
|
|
Geometrie | Zu bewältigende Querschnitte | Rund Ø300mm bis Ø600mm |
|
| Rechteck 250mm x 220mm bis 600mm x 600mm |
|
|||
| Rund <Ø300mm |
|
|||
| Rund >Ø600mm |
|
|||
| Rechteck <250x220 |
|
|||
| Rechteck >600mm x 600 mm |
|
|||
| Minimaler Kurvenradius | 90°Bogen in Ø300mm Rohr |
|
||
| zu überwindende Hindernisse | 1 cm Stufen |
|
||
| 2 cm Stufen |
|
|||
| Durchmessersprünge |
|
|||
| Anbaumöglichkeit für Module | zum Entstauben |
|
||
| zum Entfetten |
|
|||
| zum Beschichten |
|
|||
| zur Entfernung von Styropor |
|
|||
| zur Entfernung verkrusteter Ablagerungen |
|
|||
|
|
Kinematik | Bewegung des Fahrzeugs | vorwärts / rückwärts |
|
| Kurve links bzw. rechts |
|
|||
| Steigung bis 45° |
|
|||
| senkrecht |
|
|||
| Geschwindigkeit | >5m/Minute |
|
||
| stufenlos regelbar |
|
|||
| Reichweite | >50m |
|
||
| >80m |
|
|||
|
|
Statik und Dynamik | darf Kanalrohre nicht verformen |
|
|
| maximales Gewicht | <30 kg |
|
||
| so leicht wie möglich |
|
|||
| Stoßfest |
|
|||
| große Steifigkeit |
|
|||
| geringe Verformbarkeit |
|
|||
|
|
Energie | Elektrische Energie | Spannung < 48 V |
|
| Pneumatische Energie | Druck <10 Bar |
|
||
| Volumenstrom < 2 m³/min |
|
|||
| Länge der Versorgungsleitung | >50m |
|
||
|
|
Stoff | alle Außenteile korrosionsfest |
|
|
|
|
Signal | Fahrzeug | Bewegungsrichtung |
|
| Geschwindigkeit |
|
|||
| Störung |
|
|||
| Position |
|
|||
| Bilderfassung der Umgebung |
|
|||
| Arbeitseinheit | An / Aus |
|
||
| Bewegungsrichtung |
|
|||
| Geschwindigkeit |
|
|||
| Störung |
|
|||
| Position |
|
|||
|
|
Ergonomie | Bedienung | einfach |
|
| Umrüstung | Schnell und einfach möglich |
|
||
| gar nicht nötig |
|
|||
|
|
Herstellung | Verwendung von möglichst vielen Teilen aus dem Firmensortiment |
|
|
| Montagefreundlich |
|
|||
| Reparaturfreundlich |
|
|||
|
|
Gebrauch und Wartung | Wasserdicht |
|
|
| Explosionsgeschützt |
|
|||
| Wartung | Wartungsintervalle >3 Monate |
|
||
| Wartungsfrei |
|
|||
|
|
Kosten | Herstellkosten | < 10.000 DM |
|
|
|
Termin | Fertigstellung Juni 2000 |
|
4
Funktionsanalyse und Morphologie
In den auf die Morphologie folgenden Abschnitten werden die Vor- und Nachteile der einzelnen Lösungsmöglichkeiten für die wichtigsten Teilfunktionen Abstützen und Vortrieb erzeugen in Stichworten aufgelistet.
Vorteile:
Vorteile:
Vorteile:
Vorteile:
Scherenprinzip mit 3 Armen in 3
Ebenen
Vorteile:
Scherenprinzip mit 4 Armen in 2
Ebenen
Vorteile:
Vorteile:
Mit Bürsten im Kanal abstützen
Vorteile:
Mit Saugnäpfen
Vorteile:
Magnetisch festhalten
Vorteile:
Vorteile:
Vortrieb durch angetriebene Räder
Vorteile:
Vorteile:
Mit Raupenprinzip
Vorteile:
Durch das Rohr blasen
Vorteile:
Zur Lösungsauswahl werden für
drei günstig erscheinende Prinzipkombinationen die folgenden Tabellen
aufgestellt. Sie enthalten für jede bedeutende Eigenschaft das Gewicht
in einer Skala von 1 bis 3 (je größer desto wichtiger), die
Wertigkeit in einer Skala von 1 bis 4 (je größer desto besser).
Die Summe aus den gewichteten Wertigkeiten ist eine mögliche Grundlage
für die Lösungsauswahl.
Prinzipkombination A10, B1, C2, D3, E2, F1
Fahrwerk mit Rädern an den Ecken eines
Tetraeders, einer schwenkbaren Farbkamera, pneumatischer Verspannung und
gelenkter Mittelsäule
|
|
|
|
|
| Geschwindigkeit |
|
|
|
| Positionierung |
|
|
|
| Vortrieb |
|
|
|
| Überwindung von Hindernissen |
|
|
|
| Überwindung von Durchmessersprüngen |
|
|
|
| Wendigkeit |
|
|
|
| Störsicherheit |
|
|
|
| Robustheit |
|
|
|
| Handhabung |
|
|
|
| Platz für Anbaumodule |
|
|
|
| Komplexheit des Aufbaus |
|
|
|
| Anpassung an verschiedene Rohrquerschnitte |
|
|
|
| Gesamtwertigkeit |
|
||
Zwei elektrisch angetriebene Vierradfahrwerke
mit zwei schwenkbaren Farbkameramodulen, pneumatischer Verspannung und
Panzersteuerung
|
|
|
|
|
| Geschwindigkeit |
|
|
|
| Positionierung |
|
|
|
| Vortrieb |
|
|
|
| Überwindung von Hindernissen |
|
|
|
| Überwindung von Durchmessersprüngen |
|
|
|
| Wendigkeit |
|
|
|
| Störsicherheit |
|
|
|
| Robustheit |
|
|
|
| Handhabung |
|
|
|
| Platz für Anbaumodule |
|
|
|
| Komplexheit des Aufbaus |
|
|
|
| Anpassung an verschiedene Rohrquerschnitte |
|
|
|
| Gesamtwert |
|
||
Prinzipkombination A12, B6, C5, D3, E3, F3
Pneumatisch angetriebenes Gerät, das
sich mit Hilfe des Regenwurmprinzipes im Rohr festhält und fortbewegt,
mit einer schwarz - weiß Infrarot Kamera
|
|
|
|
|
| Geschwindigkeit |
|
|
|
| Positionierung |
|
|
|
| Vortrieb |
|
|
|
| Überwindung von Hindernissen |
|
|
|
| Überwindung von Durchmessersprüngen |
|
|
|
| Wendigkeit |
|
|
|
| Störsicherheit |
|
|
|
| Robustheit |
|
|
|
| Handhabung |
|
|
|
| Platz für Anbaumodule |
|
|
|
| Komplexheit des Aufbaus |
|
|
|
| Anpassung an verschiedene Rohrquerschnitte |
|
|
|
| Gesamtwert |
|
||
Für das Abstützen im Rohr kommt nur ein System in Frage, das einen sicheren Halt gewährleistet. Zum einem um sich deutlich von der Konkurrenz abzusetzen und zum anderen um bei leicht gebogenen Rohrleitungen genug Vortrieb für die geforderte Reichweite zu erzeugen.
Saugnäpfe fallen zu diesem Zweck aus, da die Oberflächen in Lüftungsanlagen häufig nicht sauber genug sind, um ausreichend Haftkraft zu erzeugen. Ein weiteres, für Saugnäpfen sehr schwierig zu lösendes Problem, sind Stoßkanten zwischen den einzelnen Rohrteilen.
Der Einsatz von Magneten ist in der Praxis auch kritisch, da nicht alle Rohre aus magnetischen Materialien bestehen. Magnete mit ebenen Oberflächen haften zudem nicht vernünftig an gekrümmten Rohroberflächen.
Für den wirtschaftlichen Einsatz ist eine möglichst schnelle Fortbewegung und die Möglichkeit während der Bewegung zu arbeiten nötig. Deshalb kann nur ein System zum Einsatz kommen, das den sicheren Halt auch während der Bewegung gewährleistet. Ein Verspannen mit Ringen oder Bürsten ist aus diesem Grund eher unpraktisch.
Die in geraden Abwasserkanälen bewährte Technik des Scherenfahrwerks ist zu lang und nicht wendig genug, um in Lüftungskanälen zum Einsatz zu kommen. Die Lösungen, die am praktikabelsten erscheinen, sind folglich einfache mit Rädern verspannte Fahrwerke.
Deshalb wird eine Variante mit den Rädern an den Ecken eines Tetraeders und eine aus zwei Vierrad- Fahrwerken in die engere Wahl gezogen. Die in rechteckigen Querschnitten pfiffige Lösung mit dem Tetraederaufbau zeigte bei einem einfachen Test in Rundrohren ein sehr kritisches Fahrverhalten. Wegen der schwer zu realisierenden Lenkung und der kleinen Auflagefläche der Tetraederlösung wird die Lösung mit zwei Vierradantrieben bevorzugt.
Aufgrund der einfachen Handhabung, und der verhältnismäßig flexiblen und leichten Zuleitungen sollen Elektromotoren eingesetzt werden. Eine Versorgung dieser Motoren aus Akkumulatoren ist aus Platz- und Gewichtsgründen, sowie der durch die Akkukapazität beschränkten Einsatzdauer nicht möglich. Pneumatische und hydraulische Energiebereitstellung hat den großen Nachteil der aufwendigen Versorgungsleitungen und der benötigten Pumpen bzw. Kompressoren im Steuerstand. Deshalb kommen sie für den Antrieb von Rädern in diesem Fall nicht in Frage, obwohl sie für ein Schreitwerk oder das Regenwurmprinzip nahezu ideal wären.
Damit eine Versorgungsleitung um mehrere Kurven gezogen werden kann ist eine hohe Zugkraft erforderlich. Um bei einer möglichst kleinen Verspannkraft eine möglichst hohe Zugkraft zu bewirken, müssen alle Räder angetrieben werden. Dies gewährleistet zudem die Möglichkeit, im verspannten Zustand Hindernisse zu überwinden. Zusätzlich kann so auch im Fall, daß nicht alle Räder aufliegen, Vortrieb erzeugt werden.
Das Prinzip des Durchblasens eignet sich nicht, da die Vorbereitungszeit vor dem Einsatz zu groß ist.
Das Gerät an einem Seil zu ziehen, scheitert an dem Aufwand, vorher ein Seil in den Kanal einzubringen.
Zur Richtungsänderung wird das Prinzip der Panzersteuerung vorgesehen. Dieses Prinzip erfordert keine zusätzlichen mechanischen Bauteilen und läßt sich mit einfachen Mitteln elektronisch verwirklichen. Auf die Möglichkeit zur ferngesteuerten Richtungsänderung kann man nicht verzichten, da man sonst nicht in der Lage ist, mit dem Gerät unterschiedlich breite Kanäle zu bearbeiten bzw. Abzweigungen zu verfolgen.
Die Preis- und Größenunterschiede zwischen den erhältlichen Monochrom- bzw. Farbkameramodulen im Vergleich zum Endprodukt ist sehr gering. Da eine Lösung, die nur Schwarz - Weiß Bilder liefert, einen billigen Eindruck macht, fiel die Entscheidung auf die Verwendung von Farbkameras. Um die Lagerkosten so gering wie möglich zu halten, sollen die Module, die schon bei DTI verbaut werden, zum Einsatz kommen.
Zur Beleuchtung werden Leuchtdioden eingesetzt. Die Leuchtdioden sind zwar deutlich teurer als herkömmliche Glühbirnen, wiegen diesen Nachteil aber durch die längere Haltbarkeit auf. Außerdem sind sie stoßfest und entwickeln dank ihres besseren Wirkungsgrades weniger Abwärme. Ein weiterer großer Vorteil der Leuchtdioden ist deren geringe Bautiefe, da sie keine zusätzlichen Reflektoren benötigen.
Da es unmöglich erscheint, ein Reinigungsgerät zu entwickeln, mit dem man alle Arten von Verschmutzungen entfernen kann, wird eine einfache Schnittstelle zum Anschluß von verschiedenen Arbeitsmodulen vorgesehen. Im Rahmen meiner Diplomarbeit wird aus Zeitgründen nur ein einfaches Bürstwerk entwickelt, das jedoch problemlos durch andere Module ersetzbar ist.
Gegeben sind:
Die Lagermittelpunktsabstände: ![]() ,
, ![]() ,
, ![]()
Raddurchmesser: ![]()
Zähnezahl des Zahnrades: ![]()
Modul des Zahnrades: ![]()
Eingriffswinkel des Zahnrades: ![]()
Maximales Abtriebsmoment: ![]()
Drehzahl: ![]()
Radandruckskraft: ![]()
Lagertragzahlen der Kugellager: ![]() ,
, ![]()
Kräfte am Zahnrad:
Kräftegleichgewicht in y Richtung
Momentengleichgewicht um z bezüglich R





Gegeben:
Nenndurchmesser: ![]()
Länge der Presspassung: ![]()
Außendurchmesser der Nabe: ![]()
Zu übertragendes Moment: ![]()
Material der Welle: ![]()
Material des Zahnrades: ![]()
Rauhtiefe von Welle und Nabe: ![]()
Querkontraktionszahl für Stahl: ![]()
Elastizitätsmodul für Stahl: ![]()
Wärmeausdehnungskoeffizient: ![]()
Raumtemperatur: ![]()
Haftreibungsbeiwert für Stahl: ![]()
Streckgrenze V2A: ![]()
Streckgrenze 9SMn28K: ![]()
Der minimal erforderliche Fügedruck ergibt sich aus

 mit
mit


Um den Fertigungsaufwand und die Lagerkosten so klein wie möglich zu halten, werden möglichst wenig neue Einzelbauteile verwendet. Die elektrischen Steckverbindungen, die Antriebsmotoren und die Kameramodule werden auf Typen beschränkt, die schon im Firmensortiment vorhanden sind. Ein Großteil der verwendeten Kugellager und Dichtungen ist ebenfalls schon Bestandteil anderer Produkte. Alle Eigenbauteile sind auf den vorhandenen Maschinen mit den vorhandenen Werkzeugen leicht zu fertigen. Außerdem wiederholen sich große Teile der NC-Programme zur Fertigung der Einzelteile. An dem in der Produktpalette vorhanden Mobilsteuerstand sind nur kleine Änderungen nötig, um ihn auch für den LuRo einsetzen zu können.
Die Gestehungskosten für den LuRo zusammen mit dem entwickelten Bürstmodul liegen bei Einzelfertigung bei ca. 9000 DM. Dieser Preis ergibt sich aus den zum Teil geschätzten Herstellkosten von Eigenbauteilen, sowie den Einkaufspreisen für Zukaufteile, welche in den Stücklisten aufgeführt sind. Bei größerer Nachfrage können die Herstellkosten deutlich gesenkt werden. Zum einen durch günstigere Einkaufspreise und zum anderen indem verschiedene Teile nicht mehr gefräst werden, sondern im Spritzgußverfahren hergestellt werden.
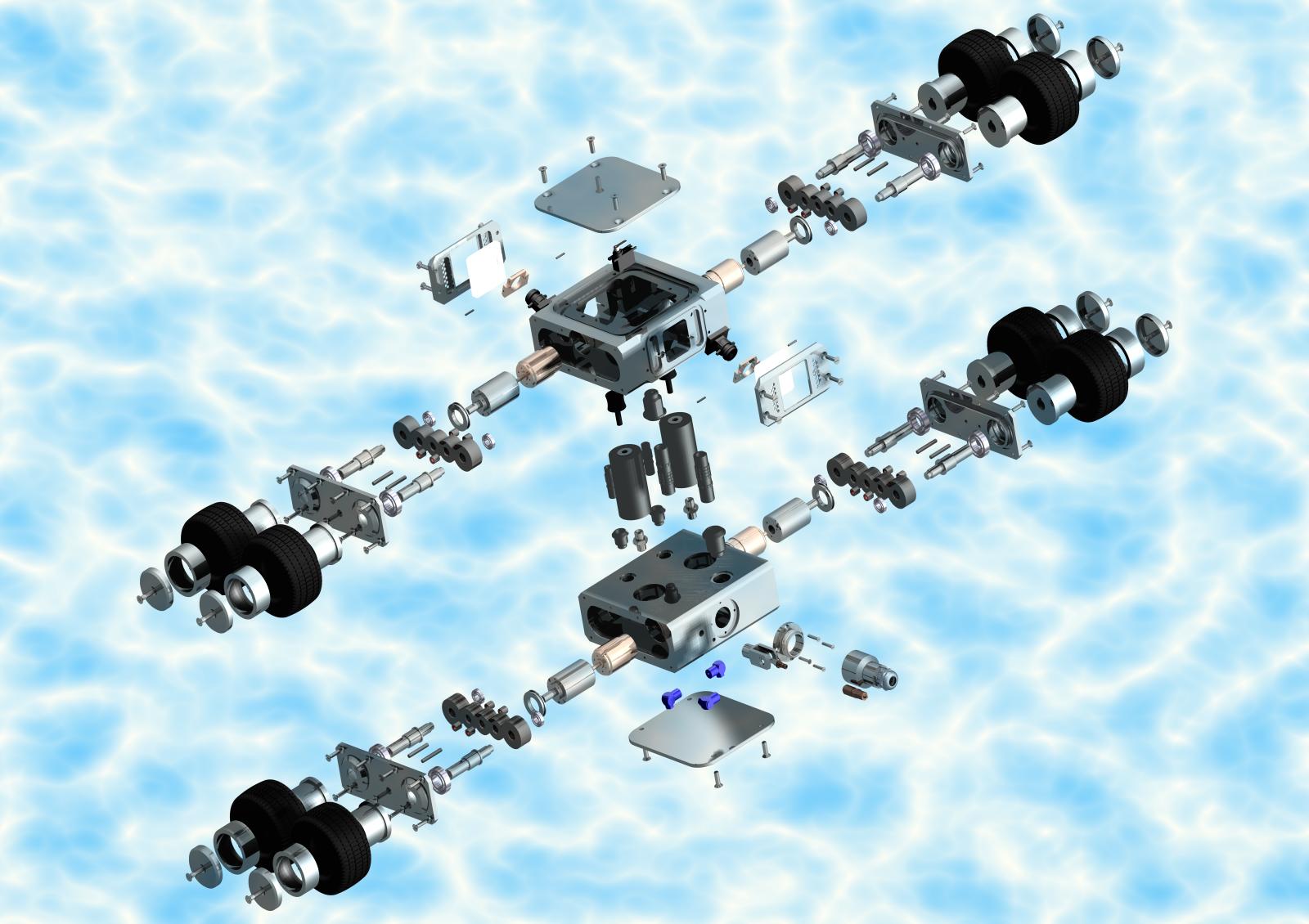
Abbildung 3: Explosionsansicht des LuRo
Der obere Teil enthält zwei schwenkbare
Farbkameramodule mit der dazugehörenden Diodenbeleuchtung. Beide Fahrwerkseinheiten
sind über zwei Pneumatikzylinder miteinander verbunden. Für besonders
flache Querschnitte ist es möglich, den unteren Teil auch eigenständig
zu betreiben. Dadurch verliert man aber die Vorteile des sicheren Haltes
im Rohr und den der hohen Zugkraft. Zusätzlich muß man in diesem
Fall eine kleine Kamera mit integrierter Beleuchtung montieren.
Da im Luftkanal nur sehr wenig Platz zur Verfügung steht, werden beim LuRo zwei einfach wirkende Pneumatikzylinder mit verstärkten Kolbenstangen und vergrößerter Führungslänge eingesetzt, damit auf eine zusätzliche Führung verzichtet werden kann. Um ein Verkanten der Pneumatikzylinder zu vermeiden und eine optimale Auflage der Räder an eine unebene Kanaloberfläche zu ermöglichen, werden zwischen der oberen Einheit und den Kolbenstangen Gummidämpfer montiert. Für die größeren Rohrquerschnitte können die Pneumatikzylinder mit wenigen Handgriffen und ohne die gedichteten Fahrwerksgehäuse zu öffnen durch längere Modelle ersetzt werden. Dadurch wird dann auch die Überwindung größerer Durchmessersprünge möglich. Der Luftdruck in den Pneumatikzylindern wird vom Operateur über einen Druckminderer am Steuerstand in einem Bereich von 0-6 Bar eingestellt. Das führt bei dem Kolbendurchmesser von 30 mm zu einer maximalen Anpresskraft der Fahrwerke von ca. 450 N. Zum Verspannen werden keine Federn verwendet, um ein Festhaken des Fahrwerks im Störfall zu vermeiden.
Für die nötige Beleuchtung des Kanals sorgen pro Kameramodul 36 ultrahelle weiße Leuchtdioden, die in der Kameraabdeckung vergossen werden. Diese Leuchtdioden bieten bei einer hohen Lichtausbeute gleichzeitig eine verhältnismäßig niedrige Abwärme und eine hohe Lebensdauer. Außerdem sind sie im Gegensatz zu herkömmlichen Glühbirnen stoßunempfindlich.
Auf den folgenden Seiten sind einige Ansichten des LuRo mit und ohne montiertes Bürstmodul zu sehen. Um mehr Details erkennen zu können, sind die Gehäuseteile zum Berechnen der Bilder durchsichtig gewählt. Im fertigen Produkt sind diese jedoch aus Aluminium.
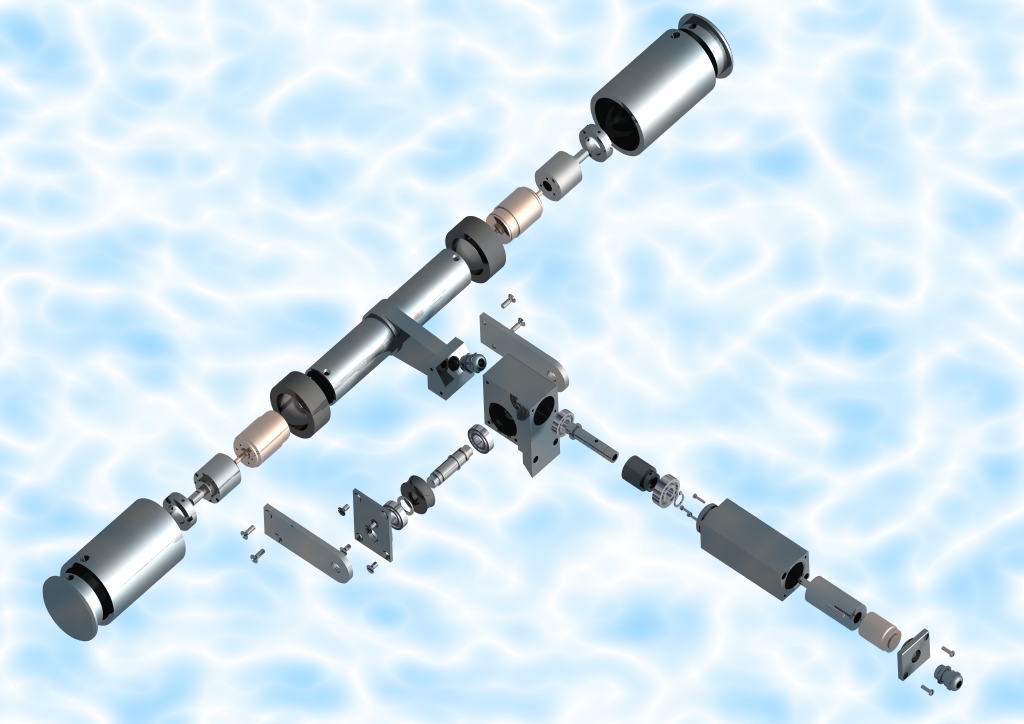
Abbildung 4: Explosionsansicht des Bürstmoduls
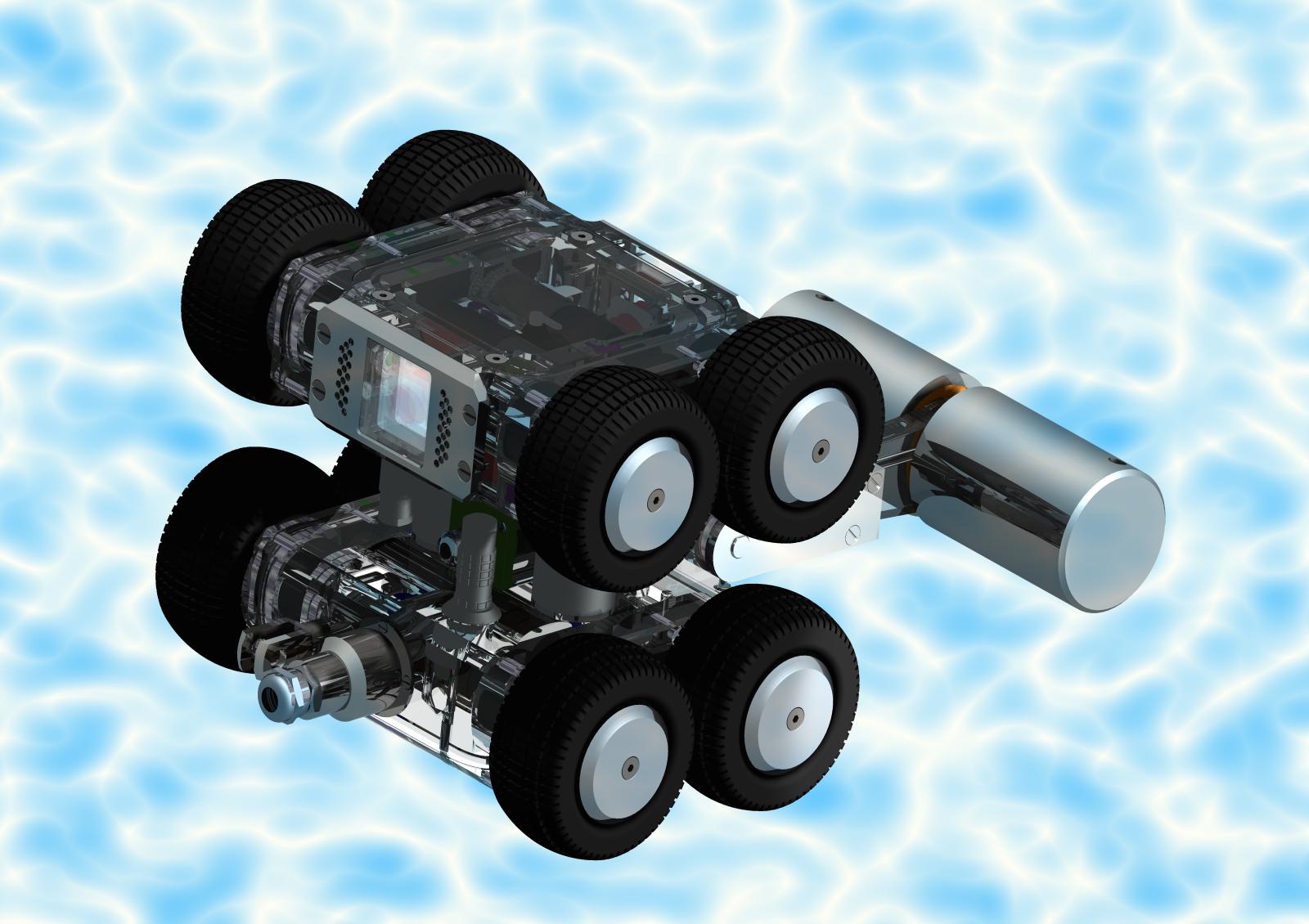
Abbildung 5: LuRo mit montiertem Bürstmodul von hinten
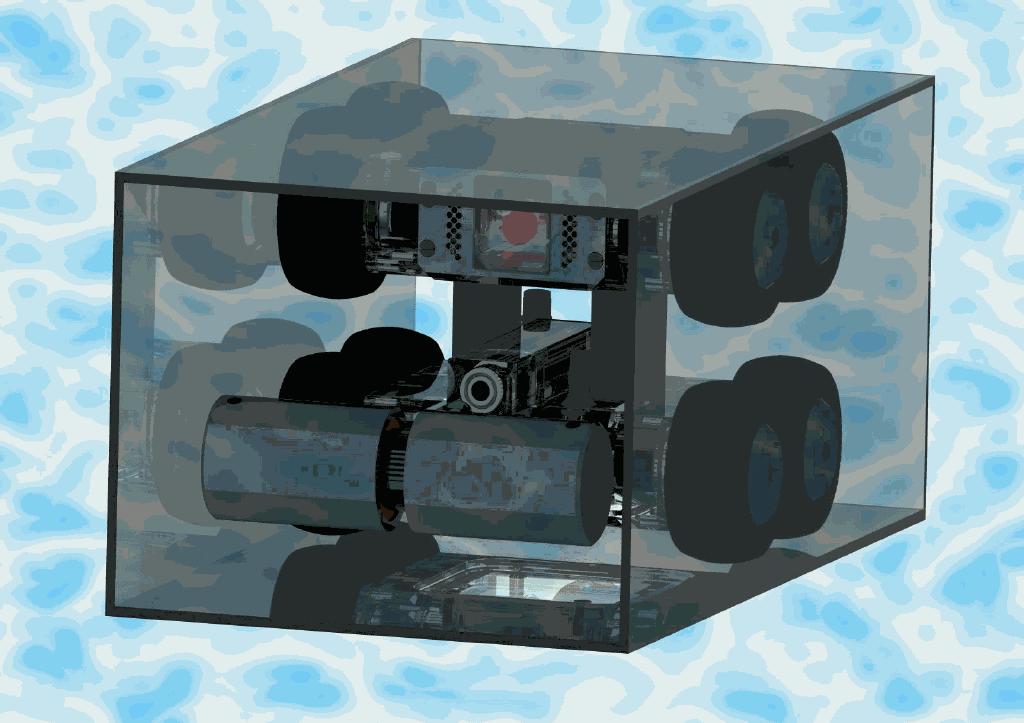
Abbildung 6: LuRo in kleinst möglichem rechteckigem Rohrquerschnitt
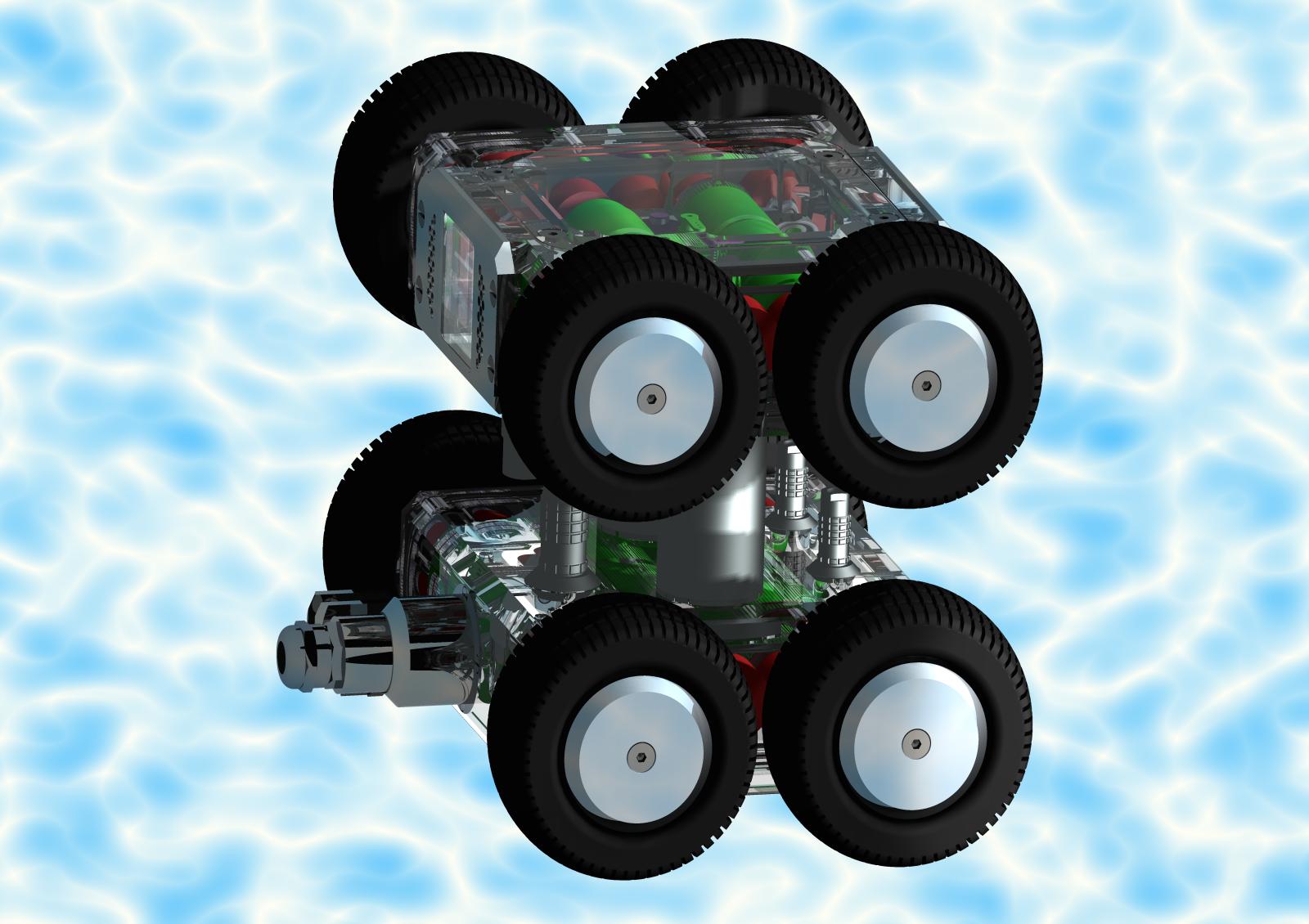
Abbildung 7: LuRo von der
Seite
K.+ R. Gieck
Technische Formelsammlung
Gieck Verlag, 30. deutsche Auflage
Mädler GMBH
Katalog 2000 Antriebselemente und Normteile
Maxxon Motor GMBH
Hauptkatalog 2000 hochpräzise Antriebe
Faulhaber Group
Antriebsysteme Katalog 2000
SKF
Wälzlager
Katalog Dd7420 1992-04
SKF
Gleitlager
Katalog 3500 T/III
INA Wälzlager Schaeffler KG
Nadellager & Zylinderrollenlager
Katalog 306
Microchip
Embedded Control Handbook Volume 1
Microchip Technology, USA 5/97, DS00092D
MINK
Hauptkatalog Bürsten
FAG
Kugellager Standardprogram
Festo
Produkte 2000 Antriebe
Pneumax
Pneumatik Hauptkatalog
Piab
Vakuumprodukte
Katalog 1999
Simrit
Standardkatalog Dichtelemente
Reiff
Technische Produkte Standardprogramm
Katalog 91/92